额,说一下我的理解吧,只是个人理解,看看就行了:
弹性力学的本质就是研究弹性力学的,首先它是一门力学,第二它富有弹性。
那么最符合这个定义的就是弹簧了。那就看弹簧,描述弹簧其实就是一个很简单的公式,即胡克定律(此处应有胡克同志的像,但是他得罪了牛顿,所以他只能躲在角落里嘤嘤的哭了):
F=-k*x (即:力等于弹簧系数乘以位移量的改变)
这个就应该很清楚,并且很直观吧,就是把弹簧压的(拉的)越大,弹簧越硬(软),使用的力量越大(小),通过这个公式能看出来什么?
能够看出:
知道力和位移改变量就知道弹簧的系数,知道了弹簧系数和力知道了位移改变量,知道了弹簧系数和位移量就知道了力。
这个说不够有逼格,并且太啰嗦,想了一下,这个公式应该算是一个方程吧,三个未知数,就算是三个量吧,改为:
知道其中两个量就可以求解方程。
这样说的话,显得不够有逼格,再上升一个逼格,知道两个未知数,这个说法太俗,改为边界条件,那么我们就可以说成:
如果确定了一个方程的边界条件,就可以求出该方程的解
。
太通俗了,并且太通用了,改一下,改一下,这不是弹性力学嘛:
当某弹性体满足某种边界条件时,根据弹性力学的基本方程,可以解算出相应的力学特性。
恩,逼格满满,这就是弹性力学讲的基本内容和目的。其中边界条件是你自己设的,根据实际的情况确定。弹性力学基本方程,这玩意就是胡克定律。下面就是解方程了,那的看个人技巧和方法了。
下面该说弹性力学的基本方程了,胡克定律有什么问题吗?有,他是描述一个直线弹性变化量的,就是描述一根筋的,也就是一维的,如果变成二维呢?如果变成三维呢?因为描述胡克定律中的每一个量都的扩充为三维,所以他们之间的关系就变得很复杂了,这里面的变化就必须引入矩阵进行描述了。并且名称也的换,太俗,不够有逼格。
首先是这组方程:
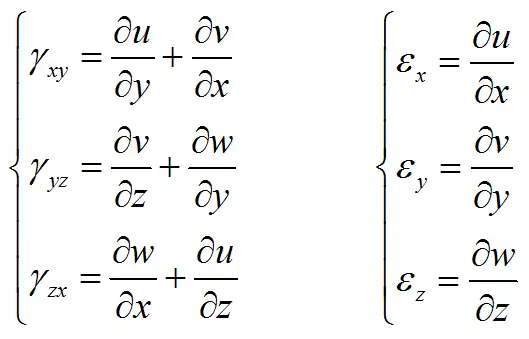
主要是用来描述三个方向位移之间的变化等式(变形连续规律),这个方程表示如果你服从我,就说明,弹性体是连续的,没有断。对应于胡克定律,那就是,描述胡克定律中的x(位移)。
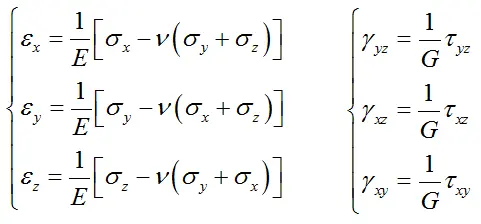
这组方程就是胡克定律了,但是这里必须是三维,所以就是广义胡克定律,也叫本构方程。对应于胡克定律中的k(弹簧系数)
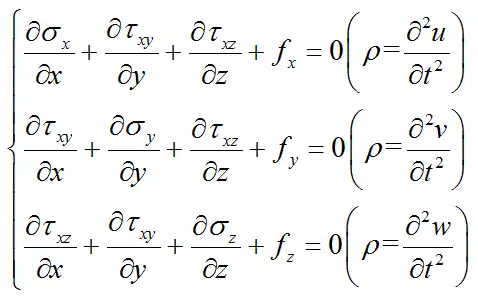
第三组方程就是这个物体是运功还是静止呢,这个的看实际的情况,所以这组方程就是用来描述这个事情的。对应于胡克定律中的F(力)
确定边界条件,根据弹性力学的基本方程,下面就是求解了,这个就看大家的水平了,各种化简技巧,各种解算技巧慢慢的用心体会吧。











